Note
Go to the end to download the full example code.
Discretization Animation#
In this example, we create an animation of the right-most part of the spectrum obtained via method proposed in [Jarlebring et al., 2010]. The considered system is the following retarded delay differential equation (RDDE) from [Verheyden et al., 2008] Section 6.1:
import numpy as np
import matplotlib.pyplot as plt
import matplotlib.animation as animation
import tdcpy
import tdcpy.plot
# Create RDDE matrix representation
A0 = np.array([[-1, 0, 0, 0],
[0, 1, 0, 0],
[0, 0, -10, -4],
[0, 0, 4, -10]])
A1 = np.array([[3, 3, 3, 3],
[0, -1.5, 0, 0],
[0, 0, 3, -5],
[0, 5, 5, 5]])
rdde = tdcpy.RDDE(A=[A0, A1], hA=[0, 1])
/home/runner/work/tdcpy/tdcpy/src/tdcpy/ddae.py:32: SyntaxWarning: invalid escape sequence '\d'
E \dot{x}(t) = \sum_{k=1}^{m_A} A_k x(t - h_{A,k})
/home/runner/work/tdcpy/tdcpy/src/tdcpy/common/delay_difference_equation.py:47: SyntaxWarning: invalid escape sequence '\d'
E \dot{x}(t) = A_0 x(t - h_{A,0}) + ... + A_{m_A} x(t - h_{A,m_A})
/home/runner/work/tdcpy/tdcpy/src/tdcpy/rdde.py:24: SyntaxWarning: invalid escape sequence '\d'
\dot{x}(t) = \sum_{k=1}^{m_A} A_k x(t - h_{A,k})
/home/runner/work/tdcpy/tdcpy/src/tdcpy/common/composition.py:72: SyntaxWarning: invalid escape sequence '\d'
E \dot{x}(t) &= A_0 x(t - h_{A,0}) + ... + A_{n} x(t - h_{A,n}) +
/home/runner/work/tdcpy/tdcpy/src/tdcpy/stability/characteristic_roots.py:53: SyntaxWarning: invalid escape sequence '\d'
E \dot{x}(t) = \sum\limits_{k=1}^N x(t-h_{A,k}) \ldots \qquad (1)
/home/runner/work/tdcpy/tdcpy/src/tdcpy/stability/characteristic_roots.py:406: SyntaxWarning: invalid escape sequence '\d'
E \dot{x}(t) = \sum\limits_{k=1}^N A_k x(t-h_{A,k})
/home/runner/work/tdcpy/tdcpy/src/tdcpy/common/discretization.py:35: SyntaxWarning: invalid escape sequence '\d'
E \dot{x}(t) = A_0 x(t) + A_1 x(t - h_{A,1}) + ... + A_{m} x(t - h_{A,m}),
/home/runner/work/tdcpy/tdcpy/src/tdcpy/stability/discretization_heuristic.py:158: SyntaxWarning: invalid escape sequence '\P'
\Psi, default 20
/home/runner/work/tdcpy/tdcpy/src/tdcpy/stability/newton.py:37: SyntaxWarning: invalid escape sequence '\e'
v0.H &0 \end{bmatrix}
to be determined by the heuristic. It is possible to access the discretization
and also raw eigenvalues of constructed eigenvalue problem from info.
roots, info = tdcpy.roots(rdde, r=-2)
print(f"N = {info.discretization}")
print(f"First 5 raw eigenvalues: {info.discretization_eigenvalues[:5]}")
N = 30
First 5 raw eigenvalues: [-256.68292389-236.9936388j -256.68292389+236.9936388j
-31.95257255-186.96261937j -31.95257255+186.96261937j
-17.63828644-124.58864958j]
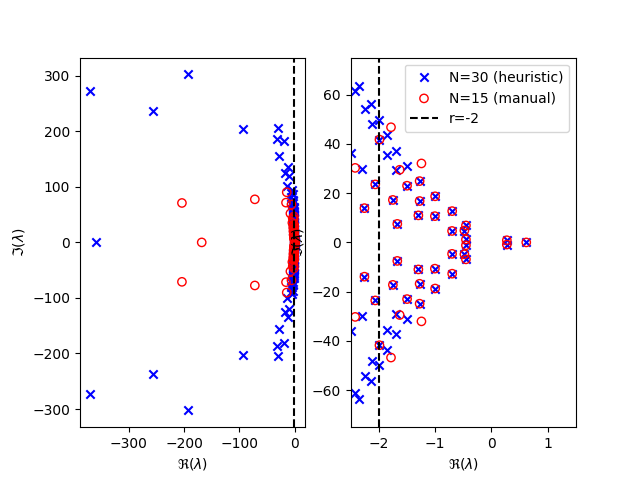
discretization eigenvalues for both cases.
roots2, info2 = tdcpy.roots(rdde, r=-2, discretization=15)
fix, (ax1, ax2) = plt.subplots(1, 2)
tdcpy.plot.complex_scatter_axplot(info.discretization_eigenvalues, ax=ax1,
marker="x", color="b")
tdcpy.plot.complex_scatter_axplot(info2.discretization_eigenvalues, ax=ax1,
marker="o", edgecolors="r", facecolors='none')
ax1.axvline(x=-2, color="k", linestyle="--", label="r=-2")
ax1.set_xlabel(r"$\Re (\lambda)$")
ax1.set_ylabel(r"$\Im (\lambda)$")
tdcpy.plot.complex_scatter_axplot(info.discretization_eigenvalues, ax=ax2,
marker="x", color="b",
label=f"N={info.discretization} (heuristic)")
tdcpy.plot.complex_scatter_axplot(info2.discretization_eigenvalues, ax=ax2,
marker="o", edgecolors="r", facecolors='none',
label=f"N={info2.discretization} (manual)")
ax2.axvline(x=-2, color="k", linestyle="--", label="r=-2")
ax2.set_xlim(-2.5, 1.5)
ax2.set_ylim(-75, 75)
ax2.set_xlabel(r"$\Re (\lambda)$")
ax2.set_ylabel(r"$\Im (\lambda)$")
ax2.legend()
plt.show()
We use the build-in function for creating the discretization animation.
If further customization would be needed, we encourage to read the source
code of tdcpy.plot.discretization_animation(.) and adapt it.
ani = tdcpy.plot.discretization_animation(
rdde,
s0=0,
discretization=range(10, 100, 5),
discretization_ideal=120,
xlim=(-5.25, 1.5),
ylim=(-200, 200),
interval=200,
)
ani.save("discretization.gif", writer="pillow")
Total running time of the script: (0 minutes 13.692 seconds)